道路经常因为老化、承受压力大、施工质量差等原因,出现路面损坏的情况,需找出破损区域及时进行路面养护。如何快速、准确获取道路路面信息成为公路养护管理的关键所在。
传统的人工检测和半自动检测存在不足:工作环境恶劣,检测人员的人身安全得不到保证,影响交通的正常运行;且费时费力,效率低,很难做到及时检测和周期性检测;受人为因素影响,不利于对路面损坏进行客观和准确的评价。桌面提供破损路面检测的功能,可基于路面的照片,识别路面的破损范围、面积和长度,高效的解决了上述问题。
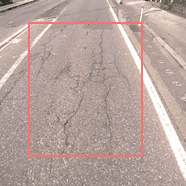
可检测的破损情况有以下几种:
| 路面破损情况 | 破损示意照片 | 说明 |
|---|---|---|
| 路面裂纹 |
|
预定义模型支持 |
| 路面结合处的裂缝 |

|
预定义模型支持 |
| 路面坑洼 |

|
预定义模型支持 |
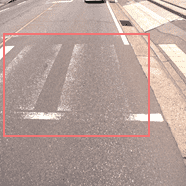
| 人行道模糊 |
|
训练自定义模型 |
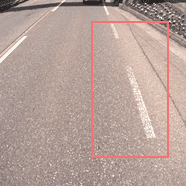
| 车道线模糊 |
|
训练自定义模型 |
数据准备
1.相机参数 :在检测破损路面时,需将检测结果的面数据从像素坐标,转换至空间地理坐标,此时,则需要相机点坐标、相机视角等参数进行计算,用户需提供道路图片对应的*.kml相机参数,该文件位于道路照片的同级目录,记录了每张照片的名称、相机点位、倾斜角度、视场角等参数,如下图所示:
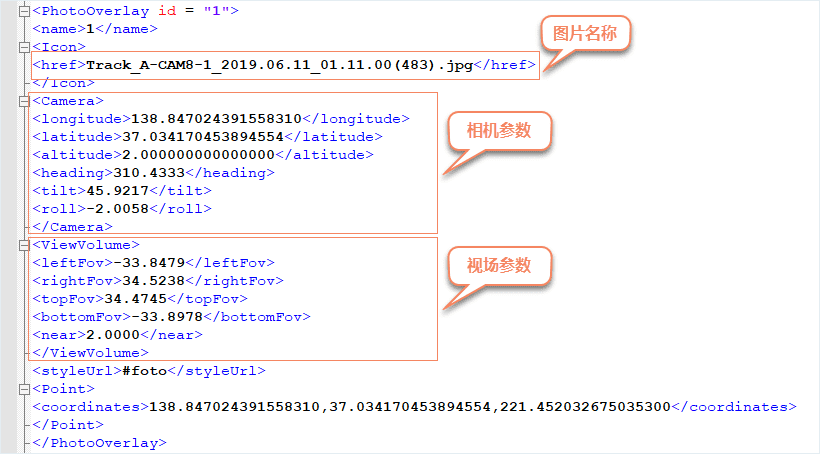
相机参数文件找那个需有以下参数::
- < href>参数:照片文件名称,同级目录下道路照片的名称;
-
< Camera>参数:记录了相机视点的经纬度等参数。
:相机视点的经度; :相机视点的纬度; :相机视点距离路面的高度; :相机与北方向的夹角; :相机围绕 X 轴旋转的角度,值为0表示镜头方向垂直指向地球,旋转值范围为0到180°; :表示相机镜头是否水平,若值为0,则表示镜头水平。
-
< ViewVolume>
参数 ::左视场角; :右视场角; :上视场角; :下视场角; :
-
< Point>
参数 :相机点位参数。:相机点位的经纬度坐标及高程。
2. 道路图片 :道路图片需为单摄像头拍摄的照片,对图片分辨率无要求,建议使用高像素、清晰的高质量图片,以保证检测结果的准确性。
主要参数
配置好机器学习所需的Python环境和CPU/GPU环境后,即可正常使用检测破损路面功能,该功能的主要参数说明如下:
- 功能入口 : 数据 -> 工具 -> 检测破损路面 。
- 相机参数文件 :选择记录了道路照片相机参数的*.kml文件。
- 图片文件夹 :相机参数文件与图片在同级目录,选择相机参数文件后,会自动将其所在文件夹填写为图片文件夹。
- 模型 :提供预定义和自定义两种方式设置模型:
- 预定义 :使用桌面默认提供的模型进行检测,下载并配置桌面的AI扩展包后,预定义模型文件为 产品包\support\video-detection\DeepTracker\modeldata\objdetroad\objdet_road.sdm ;
- 自定义 :支持选择用户自定义的模型文件,在 模型路径 处选择自定义模型即可。 注意 :模型文件需单独存放在文件夹中,且文件夹名称与模型文件名称一致。
- 结果文件夹 :选择文件夹用于存储破损面的xml文件,xml文件中记录了破损面的位置和范围,文件名称与图片名称一致。
- 结果数据集 :设置检测的结果面数据集所保存至的数据源和面数据集名称,破损面数据坐标系为WGS 1984,便于与其他地理数据叠加显示。
- 配准图片 :勾选该复选框,可根据相机参数,将图片配准至WGS1984坐标系。
- 检测成功后,输出窗口会输出破损面的的总长度和总面积。

破损路面的检测结果为下,图中橘黄色面对象为检测到的破损,影像数据为道路照片,结果数据的坐标都为WGS 1984。
