



SuperMap desktop products support the following coordinate transformation models: Position Vector (7-para), Coordinate Frame (7-para), China_3D_7P (7-para), China_2D_7P (7-para), and China_2D_4P (4-para).
Transformation Model
-
- Position Vector (7-para), Coordinate Frame (7-para): These two methods are commonly referred to as the seven-parameter transformation, or the Bursa model, including three translation parameters, three rotation parameters, and one scale parameter. They can be considered as the same model, with the only difference being the sign convention for rotation angles defined by different countries.
- Position Vector: Defined in Europe, where counterclockwise rotation is negative.
- Coordinate Frame: Defined in the United States and Australia, where counterclockwise rotation is positive.
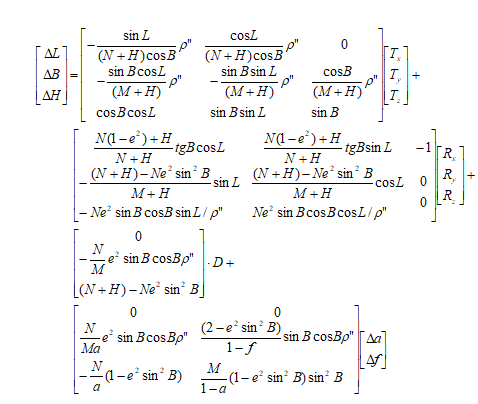
- China_3D_7P (7-para): The three-dimensional seven-parameter transformation model is used for point coordinate transformation between geodetic coordinate systems based on different earth ellipsoid datums. It involves three translation parameters, three rotation parameters, and one scale parameter, and also needs to account for the differences in the semi-major axis and flattening of the two corresponding earth ellipsoids.
- China_2D_7P (7-para): The two-dimensional seven-parameter transformation model is used for point coordinate transformation from a geocentric coordinate system to a geodetic coordinate system based on different earth ellipsoid datums. It involves three translation parameters, three rotation parameters, and one scale parameter.
- China_2D_4P (4-para): The two-dimensional four-parameter transformation model is used for plane coordinate transformation in local areas and between different Gauss-Krüger projection planes. It involves two translation parameters, one rotation parameter, and one scale parameter. For three-dimensional coordinates, the coordinates need to be transformed into plane coordinates through Gauss-Krüger projection before calculating the transformation parameters.
- Position Vector (7-para), Coordinate Frame (7-para): These two methods are commonly referred to as the seven-parameter transformation, or the Bursa model, including three translation parameters, three rotation parameters, and one scale parameter. They can be considered as the same model, with the only difference being the sign convention for rotation angles defined by different countries.
Scope of Application
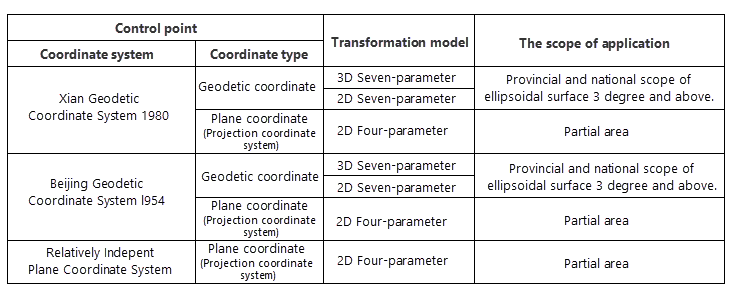
Since the selection of the transformation model is affected by the coordinate system of control points and the transformation area, users can refer to the scope of application of transformation models given in the "Technical Regulations for Coordinate Transformation of Geodetic Control Points" and select a transformation model according to the coordinate system of the source control points and the applicable area of the model.
-
- Position Vector (7-para), Coordinate Frame (7-para): Applicable to the spatial rectangular coordinate transformation of control points at provincial and national levels.
- China_3D_7P (7-para): Applicable to coordinate transformation of control points on the ellipsoid with a width of 3° or more at provincial and national levels.
- China_2D_7P (7-para): Applicable to coordinate transformation of control points on the ellipsoid with a width of 3° or more at provincial and national levels.
- China_2D_4P (4-para): Applicable to plane coordinate transformation of control points in small areas and to the connection between relatively independent planar coordinate systems and the 2000 National Geodetic Coordinate System.
The following table shows the selection of coordinate transformation models and their scope of application for converting control points from different coordinate systems to the 2000 National Geodetic Coordinate System:
 |
Application Scenarios
Through SuperMap desktop, users can convert a local coordinate system dataset to the 2000 National Geodetic Coordinate System without the need for other plug-ins, achieving transformation results between different coordinate systems.
Step 1: Transform the local coordinate system to a common coordinate system: Use the "Reproject Dataset Function" and select the two-dimensional four-parameter (China_2D_4P) transformation model to transform the local coordinate system to the actual common coordinate system.
Step 2: Transform the common coordinate system to the 2000 National Geodetic Coordinate System: Use "Calculate Transformation Model Parameters" to calculate the transformation parameters, and then use the "Reproject Dataset Function" to select a transformation model such as two-dimensional seven-parameter (China_2D_7P), three-dimensional seven-parameter (China_3D_7P), or Coordinate Frame to achieve the transformation from the common coordinate system to the 2000 National Geodetic Coordinate System.
- If the local coordinate system is derived from a common coordinate system (e.g., Xian 1980, Beijing 1954, etc.) with offsets, to transform the local coordinate system to the 2000 National Geodetic Coordinate System, first convert the local coordinate system to the actual common coordinate system, and then from the common coordinate system to the 2000 National Geodetic Coordinate System. In SuperMap desktop, this can be done through the following operations:
- If the local coordinate system is based on a real coordinate system within a projection zone, the above Step 2 can be directly applied to transform the local coordinate system to the 2000 National Geodetic Coordinate System.
Model Expressions
-
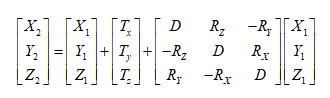
- Position Vector (7-para), Coordinate Frame (7-para)
- China_3D_7P (7-para)
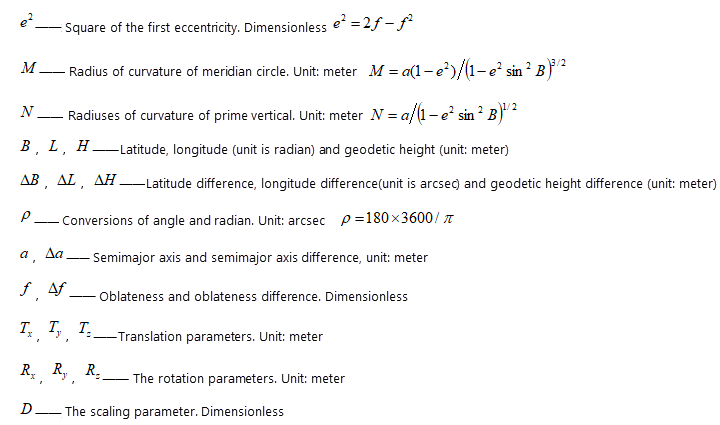
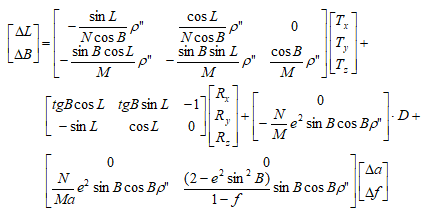
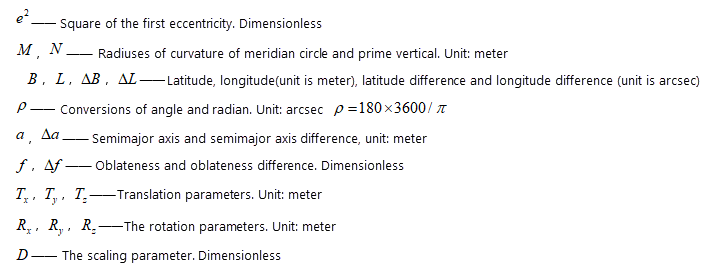
- China_2D_7P (7-para)
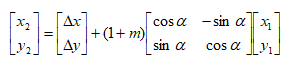
- China_2D_4P (4-para)
Notes:
|
Related Topics
Calculate Transformation Model Parameters