视频配准
摄像头及其拍摄的视频都具有空间地理信息,视频与GIS数据叠加制图、结合分析之前,需将视频空间化,使图像坐标转换为地理空间坐标,标定视频的地理空间范围,并构建视频图像空间与地理空间的映射关系。iDesktopX提供了视频坐标与地图坐标实时转换的能力,当监控球机拍摄角度转动、焦距倍数变化时,可根据摄像头方位角、俯仰角、视场角等参数,实时对视频、地理围栏等数据进行坐标转换,避免费时、费力的手动调整与换算。
视频配准原理
视频配准与投放的实现技术如下图所示:O点为摄像头点位,AB为拍摄到的地面范围,A’B’为对应的相片范围,C为相片中点。已知摄像机的地理坐标(x,y,h)、方位角、俯仰角γ、垂直视场角α、水平视场角β,可以根据三角函数关系求得相片中点C的地理坐标及A’B’的实际距离。再获取到相片的像素大小后,可以根据像素大小与实际距离的对应关系求得每个像素对应的实际距离,进而求得相片上任一点P’的地理坐标。

视频参数说明
- 经纬度:相机所在位置X、Y坐标。
- 高度:相机距离地面的垂直高度。
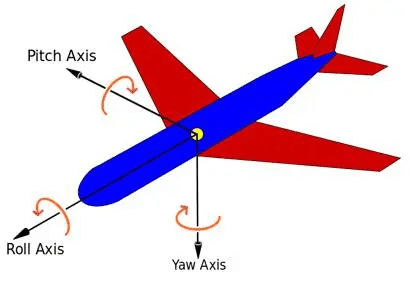
- 偏航角(yaw):相机拍摄方向与正北方向的夹角,顺时针方向的偏航角为正值。
- 俯仰角(pitch):相机体轴(沿机头方向)与水平面之间的夹角,相机水平面拍摄俯仰角为0,相机俯拍俯仰角为负值,相机正射拍摄俯仰角为-90度。
- 侧偏角(roll):飞机对称平面与飞机机体纵轴的铅垂平面间的夹角,右侧偏夹角为正。
- FovX:相机水平方向可视域(角度)。
- FovY:相机垂直方向可视域(角度)。