相机参数配准主要用于非定点拍摄的视频。提供相机点位偏移、导入相机参数、保存参数功能按钮对视频数据集进行配准。
相机点位偏移
Supermap iDesktopX 通过相机点位偏移功能将配准后的数据集移动到地图中对应的位置。由于相机拍摄的视频或图片存在一定的畸变,畸变程度一般表现为拍摄中心畸变小,距离中心越远,畸变程度越大。畸变还受拍摄的距离、俯仰角等拍摄姿态影像。通过配准后的视频数据集只能做到局部区域与地图完全重合,若当前完全重合区域非客户想要完全重合的区域,则可通过此功能将视频数据集整体移动至需要完全重合的区域。
相机点位偏移的具体操作如下:
在地图窗口中通过单击数据右键选择拾取坐标项,分别在地图中的特征点和视频数据集中的特征点拾取坐标信息,在输出窗口中可以查看拾取的坐标信息。用地图中特征点的坐标减去视频数据集特征点的坐标,得到x、y偏移量。在视频配准选项卡->相机参数配准组中选择相机点位偏移按钮,在弹出的相机点位偏移对话框中设置以下参数:
- 相机姿态文件:设置视频数据的相机姿态文件,相机姿态文件的获取请参见无人机视频接入与配准。
- X:设置存放X坐标的字段,根据相机姿态文件信息进行选择。
- Y:设置存放X坐标的字段,根据相机姿态文件信息进行选择。
- X偏移:设置通过计算得到的X偏移量。
- Y偏移:设置通过计算得到的Y偏移量。
完成以上参数设置,即可点击确定按钮,完成相机点位偏移的操作。
导入相机参数
对于移动拍摄的视频,需要用相机参数配准进行校正,通过导入相机参数,可快速对视频数据集进行配准。相机参数需先获取无人机飞行姿态文件后,将姿态文件转换成.CSV格式并计算高度和时间戳,详情可参考无人机视频接入与配准。
导入相机参数的操作如下:
单击视频配准选项卡->相机参数配准组->导入相机参数按钮,弹出导入相机参数对话框,在对话框的相机参数文件中选择参数文件,系统会根据文件信息,将文件中对应的字段赋给对应的参数。如下图:
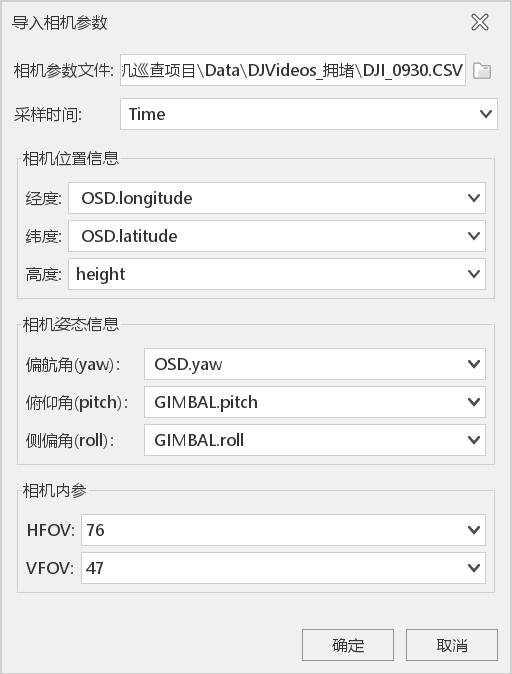
注意:若相机参数没有对应的字段信息,可以通过手动输入。比如:相机内参数中HFOV输入88,VFOV输入49.5。VFOV是通过原视频的分辨率计算得来,比如视频大小为3840×2160,则VFOV=HFOV/(3840/2160)。
保存参数
保存参数按钮将相机参数保存到视频数据集内部,用于执行视频配准。操作如下:
点击视频配准选项卡->相机参数配准组->保存参数按钮,将导入的相机参数保存到视频数据集内部,即可完成视频配准操作。