



↵
Fine Plane Accuracy Evaluation
Feature Description
Fine plane accuracy evaluation divides the image into multiple partitions according to specified area boundaries and assesses the correction accuracy within each partition. This method helps understand the distribution of correction errors across different partitions, providing crucial insights for image quality assessment and optimization.
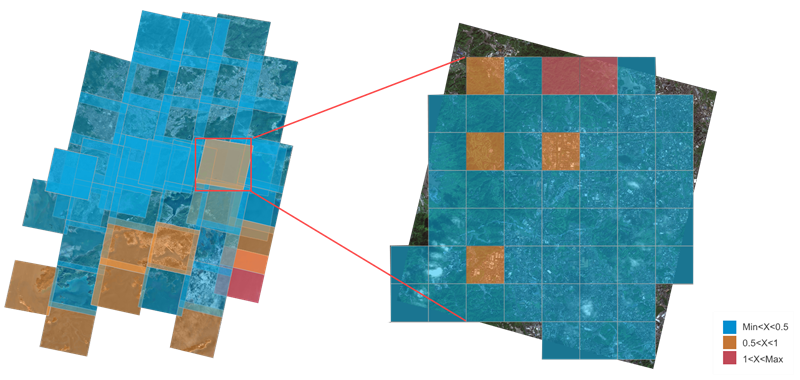 |
| Figure: Plane Accuracy (Left) and Fine Plane Accuracy (Right) |
Feature Entry
Imagery Tab -> Quality Assessment Group -> Fine Plane Accuracy.
Parameter Description
- Image to be checked: Specifies the mosaic dataset of the image to be checked, which defaults to the orthoimage in the mosaic dataset. If no orthoimage is available, the first mosaic dataset will be used. Provide four ways to input image files: adding files, adding folders, adding lists, and adding embedded data. When selecting to add a folder, all image files in that folder (including subfolders) will be automatically retrieved.
- Reference image: Specifies the mosaic dataset containing the reference image. Provide four ways to input image files: adding files, adding folders, adding lists, and adding embedded data. When selecting to add a folder, all image files in that folder (including subfolders) will be automatically retrieved.
- Partition Detection:
- Range Data Source: Specifies the datasource containing the area boundary dataset for detection.
- Bounds Dataset: Specifies the boundary dataset used for partitioning and detection. If not specified, the entire image will be checked by default.
- Partition Area: Defines the minimum area for each partition. Default value is 1 with unit km².
- Number of Partitions: Displays the total number of partitions divided based on the specified partition area.
- Checkpoint Parameters:
- Maximum Points per Partition: The upper limit of points allowed in a partition. Matching stops when this value is exceeded. Default: 1000.
- Search Distance: Defines the search radius for seed point matching. Valid range: [0, 256]. Default: 40 px. Larger radius increases processing time.
- Residual Threshold: Sets the error threshold for checkpoints. Valid range: [0, 40]. Default: 5 px. Higher thresholds retain more points but may include outliers.
- Error Unit: Specifies the unit for accuracy tolerance. Options: px, m, deg. Default: px.
- Accuracy Tolerance: Evaluates checkpoints based on overall RMSE by counting points within 1x, 1-2x, and over 2x tolerance. Default: 5.
- Exclude Building Area Points: When enabled, automatically detects and excludes checkpoints within building areas.
- Results: Displays evaluation results similar to the Plane Accuracy Report. Fine plane accuracy evaluation provides detailed checkpoint statistics by partition:
- Output coordinate system: Set the coordinate system for the output result surface dataset and checkpoints, making it easy to overlay and display with other data. The default is GCS_WGS_1984.
- Report Directory: Specifies the output folder for quality reports. Report name: QualityReport_Region.html.
- Export to Excel: When checked, outputs report in Excel format. Default format is HTML.
Related Topics