



类 TransformationMode
- java.lang.Object
-
- com.supermap.data.Enum
-
- com.supermap.data.TransformationMode
-
public final class TransformationMode extends Enum
该类定义了数据配准模式类型常量。
数据配准模式主要有四种:线性配准、矩形配准、二次多项式配准和偏移配准。
线性配准:也称仿射变换,这种配准方法假设地图因变形而引起的实际比例尺在 x 和 y 方向上都不相同,因此,具有图纸变形的纠正功能。假设 x、y 为输入图像的原始坐标,X、Y为纠正后的输出坐标,则坐标变换的公式如下:

上式中6个待定系数A、B、C、D、E、F,可以通过选择配准图层和参考图层的同名控制点来确定。若需计算这6个待定系数,理论上至少需要获取不在同一直线上的3个控制点坐标。若取常数项系数 C、F 为0,则至少需要2个控制点,所以实际应用中,通常利用2个以上的点来进行几何纠正。这里待定系数是通过最小二乘法的原理进行求解的。线性变换是最常用的一种配准纠正方法,由于同时考虑了 x 和 y 方向上的变形,所以纠正后的坐标在不同的方向上的长度比会不同,表现为原始坐标会发生如缩放、旋转、平移、扭转等变化后得到输出坐标。
矩形配准:实质上是一种特殊的、有限定条件的线性配准。如果原始图像为规则矩形,配准纠正后的图像仍是规则矩形,则选择2个相对的角点就可以确定矩形4个角点的坐标,在线性配准的纠正公式中,常数项取作0,则已知4个角点坐标就可以求解得到纠正公式,从而实现几何纠正。由于只需要取2个相对的角点,因而既方便又节省时间,同时,也减少了由于选取多个控制点造成的误差累积。由于矩形配准未计算输出结果的误差,所以其配准精度不可知,是一种精度不高的粗纠正。
二次多项式配准:遥感中常用的精度较高的配准方法。多项式纠正把原始图像的变形看成是某种曲面,输出图像为规则平面。从理论上讲,任何曲面都能以适当高次的多项式来拟合。一般用二次多项式就可以对变形比较严重的图像进行纠正,并得到较高的精度。二次多项式的纠正公式如下:
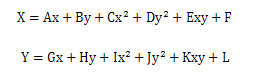
上式中共有12个待定系数,理论上,需要6个控制点就可实现几何纠正,但为了得到比较高的精度,一般要求二次多项式纠正的控制点至少为7个,适当增加控制点的个数,可以明显提高图形配准的精度。多项式待定系数是通过所选定的控制点坐标,按照最小二乘法回归来确定的。对比线性配准的纠正公式,可以得知,线性配准其实是一次多项式配准,二次多项式配准比线性配准需要更多的控制点,也会纠正更多的变形。对于多数具有中等几何变形的小区域的卫星图像,一次线性多项式就可以纠正6种几何变形。
偏移配准:偏移配准仅需要一组控制点和参考点,分别对 x 坐标和 y 坐标求差值,再利用差值对原数据集所有组坐标点进行偏移。
-
-
字段概要
字段 限定符和类型 字段和说明 static TransformationModeLINEAR线性配准。static TransformationModeOFFSET偏移配准。static TransformationModeRECT矩形配准。static TransformationModeSQUARE多项式配准。
-
-
-
字段详细资料
-
RECT
public static final TransformationMode RECT
矩形配准。
-
LINEAR
public static final TransformationMode LINEAR
线性配准。
-
SQUARE
public static final TransformationMode SQUARE
多项式配准。
-
OFFSET
public static final TransformationMode OFFSET
偏移配准。
-
-