



场景分类
随着卫星遥感图像和航空遥感图像分辨率不断提高,可以从遥感图像中获得更多有用的数据和信息。针对不同场合的应用,对遥感图像的处理也有着不同的要求,为了有效地对这些遥感图像数据进行分析和管理,需要根据图像内容给图像贴上语义标签,而场景分类就是解决该类问题的一种重要途径。
场景分类是根据一定的地物特征对影像数据进行分类,区分出具有相似特征的区域,为每一幅图像赋予场景标签,所以场景分类的关键就在于对图像特征的提取。
场景分类结果为大小均匀(32*32像元)的矢量网格,每个网格带有其对应位置影像的场景标签,是一种低于像元级别的粗粒度分类方法。场景分类一般用于较大尺度的分类任务,如城市局部气候区分类等。
主要参数
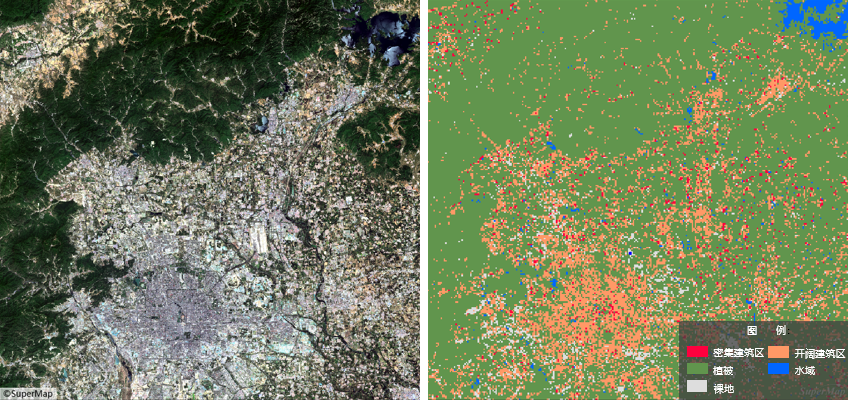
局部气候分区(Local Climate Zone,LCZ)是一种新兴的城市热岛研究标准理论方法,可广泛应用于城市规划、气象建模等领域,我们可使用场景分类功能,将整个城市划分为大量规则网格(32*32像元)。通过神经网络模型,对每个网格的类型进行推理。下图为北京地区的局部气候分区场景分类结果图,右侧红色为稠密建筑区,橙色为开阔建筑区,绿色为植被,白色为裸地,蓝色为水域。
- 功能入口:工具箱->机器学习->影像分析->场景分类工具。
- 文件类型:支持选择数据集或文件夹,可批量推理数据,提升推理效率,默认值为数据集。
- 数据源/数据集:文件类型选择数据集时填写该参数,选择需要分类的影像或镶嵌数据集。
- 文件路径:文件类型选择文件夹时填写该参数,选择需要分类的文件夹路径,会自动读取文件夹中*.tif、*.img 等格式的影像文件。
- 模型文件:选择场景分类的模型文件(*.sdm)。
- 单步运算量:推理时一次处理的图片数量,默认值为1。在合理范围内,单步运算的数量与内存(显存)占用成正比,与推理时间成反比。
- 处理器类型:可以使用计算机中央处理器 (CPU) 或图形处理单元 (GPU) 来处理数据。GPU具有较快的计算速度。
- GPU编号:可以指定用于处理数据的 GPU 标识号,默认值为 0。支持多卡推理。
- 其他参数设置:勾选该复选框即可设置范围数据集/数据源参数。
- 范围数据集/数据源:用于自定义范围推理,可根据输入的矢量数据集范围推理影像。
- 结果数据:即场景分类的结果面数据集,设置结果数据集保存的数据源和保存名称。
- 运行:单击对话框中的运行按钮,即可执行场景分类操作,此时,Python 窗口会显示功能执行的进度信息。
相关内容
