使用说明
支持将同一个文件夹中的模型数据批量导入,支持常规模式和点加模型模式两种导入方式,导入常规模型和点加模型建议采用此功能。采用常规模式批量导入的模型对应的是同一模型定位点 ;采用点加模型模式批量导入的模型,每个模型对应的是各自的定位信息以及模型名称字段信息。支持的模型数据格式有.osgb、.osg、.s3mb、.s3m、.3ds、.x、.dxf、.obj、.fbx、.dae、.stl、.off、.sgm、.skp、.gltf、.flt等。
功能入口
- 开始 选项卡-> 数据处理 -> 数据导入 -> 三维 -> 模型文件夹 。
- 在工作空间管理器中选中需导入到的 数据源 ->单击鼠标右键-> 批量导入模型… 。
操作步骤
- 在“ 开始 ”选项卡->“ 数据处理 ”->“ 数据导入 ”下拉按钮中的“ 模型文件夹 ”按钮或在工作空间管理器中选中需导入到的数据源 ,单击鼠标右键选择“批量导入模型…”菜单,弹出“数据导入”对话框。
- 单击“添加文件”按钮,弹出“选择文件夹”对话框,在该对话框中定位到要导入的三维模型数据所在的文件夹,单击“确定”按钮。
- 此时指定文件夹已经添加到“数据导入”对话框的列表框中,对话框右侧区域显示了导入模型文件夹需要设置的参数。
- 结果设置中的数据源、结果数据集,请参见数据导入公共参数说明页面。
- 导入模式分为常规模式和点加模型模式两种模式。各自的参数设置如下:
- 常规模式:
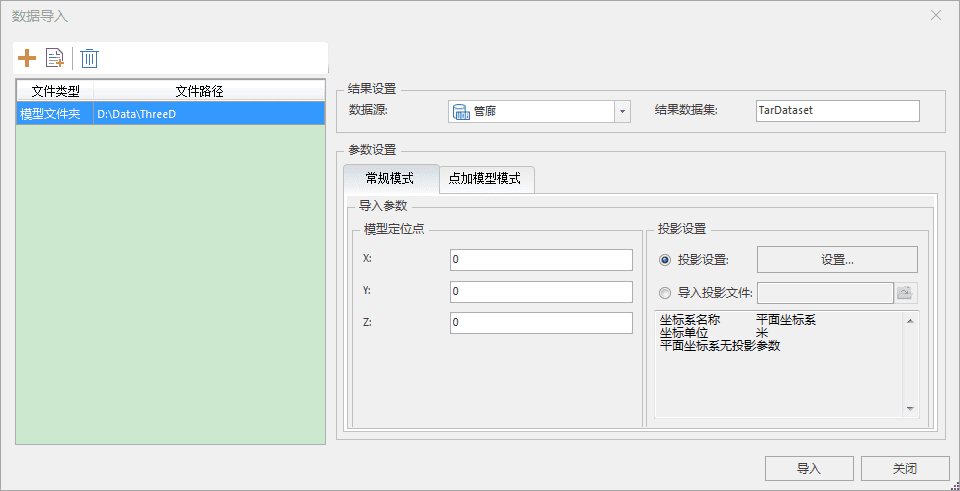
- 模型定位点 :是指模型自身局部坐标原点的坐标,默认为0,0,0。
- 投影设置 :支持投影设置和导入投影文件两种方式设置投影坐标系,详细操作步骤请参见“设置投影坐标系”。
- 点加模型模式:
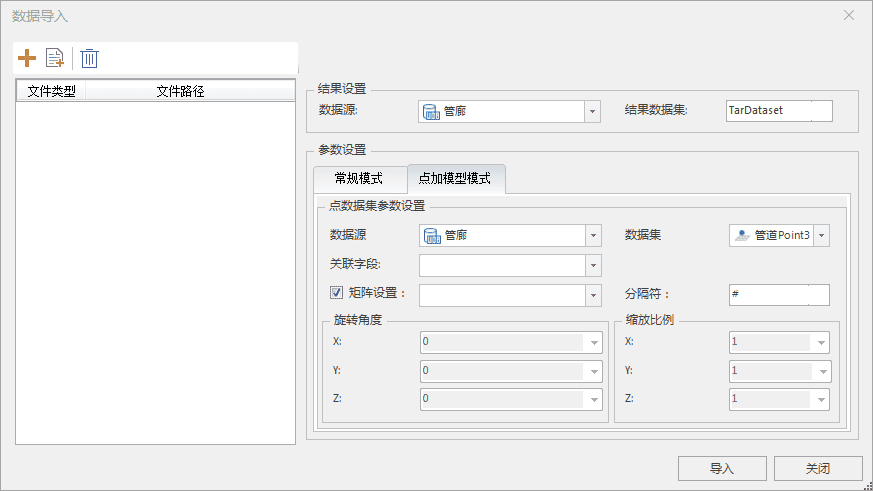
- 数据源:选择模型定位点数据集所在的数据源。
- 数据集:选择模型数据的定位点数据集。
- 关联字段:设置点数据集与模型数据的关联字段,通过关联字段确定模型数据对应的点及其坐标。点关联的模型,支持相对路径和绝对路径、或模型名称(带后缀)。
- 矩阵设置:设置含有旋转缩放平移参数的4*4矩阵字段(行排列)。矩阵字段用于模型的旋转、、缩放和平移。默认勾选,勾选后需在矩阵下拉框中选择点数据集中存储矩阵的字段。若勾选则旋转角度与缩放比例不可修改。
- 分隔符:4*4矩阵用指定的分隔符隔开,如示例中“#”即为分隔符号,矩阵字段是按照从左到右,从上到下的顺序排列并以分隔符号隔开。
本案例数据重某一点数据集中存储的矩阵字段为“-0.908227379442754#-0.418477033098051#-2.77555756156289E-17#0#0.418477033098051#-0.908227379442754#0#0#3.80561360628579E-18#5.55111512312578E-17#1#0#0#0#0#1”,则相应的4*4矩阵如下图所示。

案例数据矩阵示例
- 旋转角度:用于设置三维模型 X、Y、Z 三个坐标方向的旋转,单击组合框右侧下拉按钮,分别选择一个字段设置为 X、Y、Z 三个方向的旋转角度,可设置为空字段。
- 缩放比例:用于设置三维模型进行 X、Y、Z 三个坐标方向拉伸,单击组合框右侧下拉按钮,分别选择一个字段设置为 X、Y、Z 三个坐标方向拉伸比例,可设置为空字段。
- 参数设置完毕后,单击“导入”按钮,即可执行导入模型文件夹中的模型数据操作。
注意事项
- 模型数据导入后,模型数据集的坐标系默认与定位点数据集坐标系一致。
- 以点加模型模式导入模型数据后,导入后的结果模型数据集会保留点数据的所有属性字段信息。