



二三维数据生产指二维正射影像数据生产和三维倾斜摄影模型生产。基于无人机飞行的照片可生产二维tiff影像和三维OSGB或OBJ倾斜摄影模型。该数据可应用于应急救援、河道治理、森林妨害、农业病虫害治理、自然灾害评估等业务场景,作为基础数据底座为各行业应用赋能。
 |
| 图:二三维数据生产数据应用 |
任务规划
SuperMap UAVSurvey(以下简称“UAVSurvey”)是无人机空间视频数据采集App,支持四种任务规划方式:航点任务,矩形任务,多边形任务,导入任务轨迹。
航点任务支持以打点的形式规划线型飞行任务。矩形任务为飞行区域为矩形的面状任务,多用于正射飞行,也可用于倾斜摄影飞行。多边形任务为任务区域为任意多边形的面状任务,多用于倾斜摄影飞行,亦可用于正射飞行。导入任务支持飞行任务航线和区域的导入,飞行参数在UAVSurvey中设置。对于二三维数据生产推荐使用矩形任务、多边形任务和导入任务。
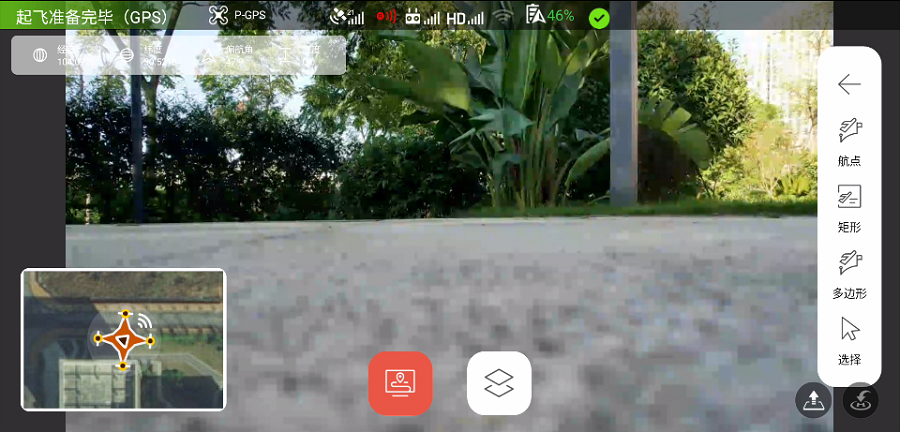 |
| 图:任务规划 |
飞行监控
飞行任务规划完成后,UAVSurvey可根据指定任务执行飞行。在飞行过程中,飞手可实时监控飞机的飞行轨迹、无人机在地图中的实时位置、地图中查看无人机采集的视频画面,无人机姿态信息和硬件运行状况。
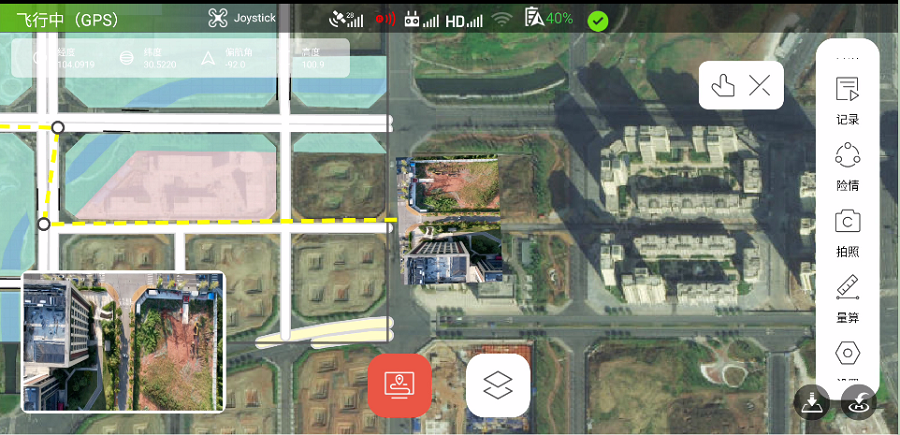 |
| 图:飞行监控 |
数据存储与导出
无人机执行飞行任务后采集的照片和视频数据存储于移动设备的物理目录下,路径为:UAVSurvey/User/Customer/Data/...,其中Picture文件夹下存储照片数据,Record文件夹下存储视频数据。数据通过物理设备导出。针对二三维数据生产来讲,导出Picture文件夹下内容即可。
 |
| 图:数据存储与导出 |
二三维数据生产
行业中二三维数据生产的软件较多,用户可根据显示情况自行选择,本文选用的第三方数据生产平台为大势科技的重建大师。超图平台支持以手动配准的方式生产正射影像。
工具栏中选择工程/创建工程,设置工程名称和存储路径,工程属性选择“倾斜”。
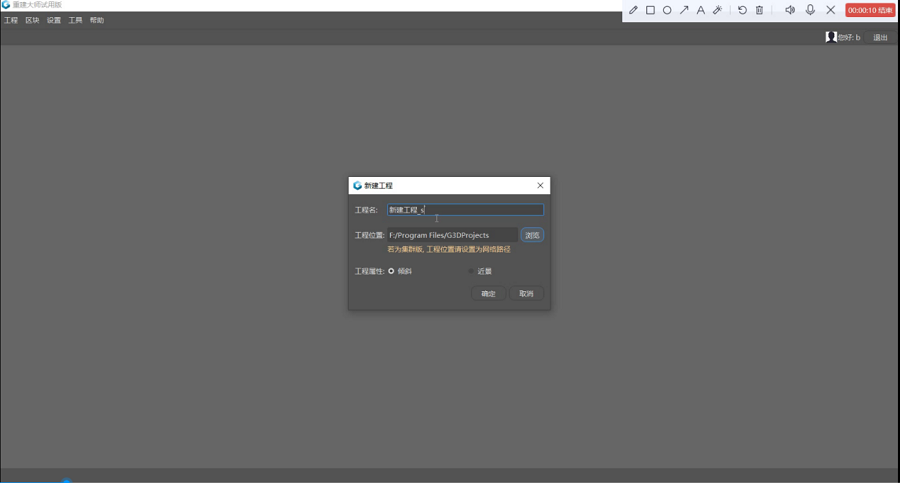 |
| 图:创建工程 |
工程创建后,选择“导入”按钮。
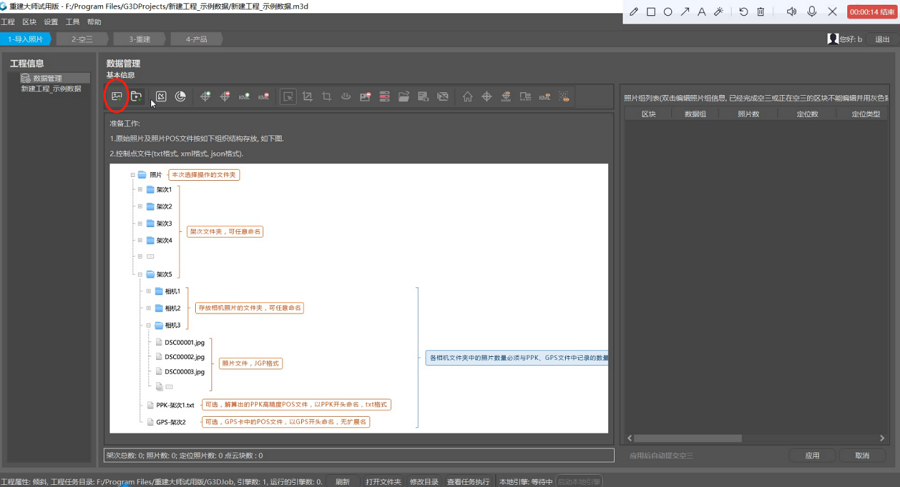 |
| 图:导入 |
选择本地照片存储目录。
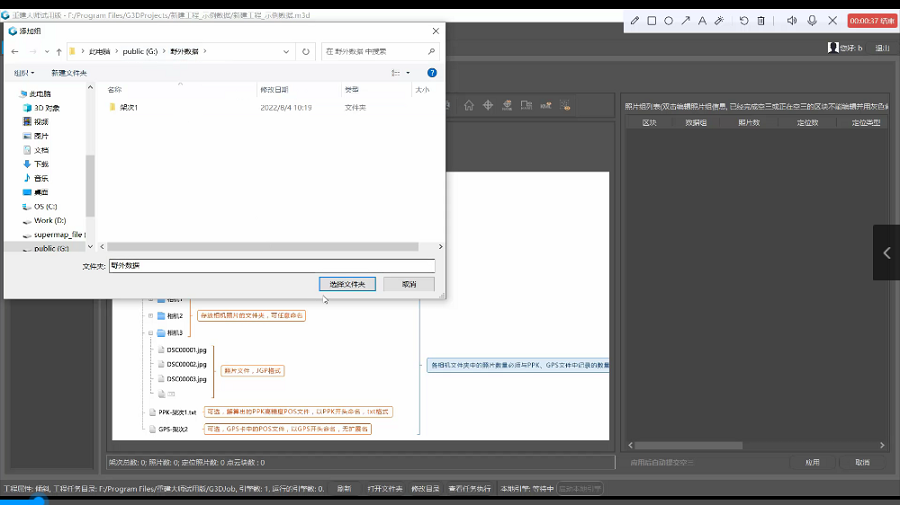 |
| 图:选择存储路径 |
数据组右键,选择定位方式为EXIF。
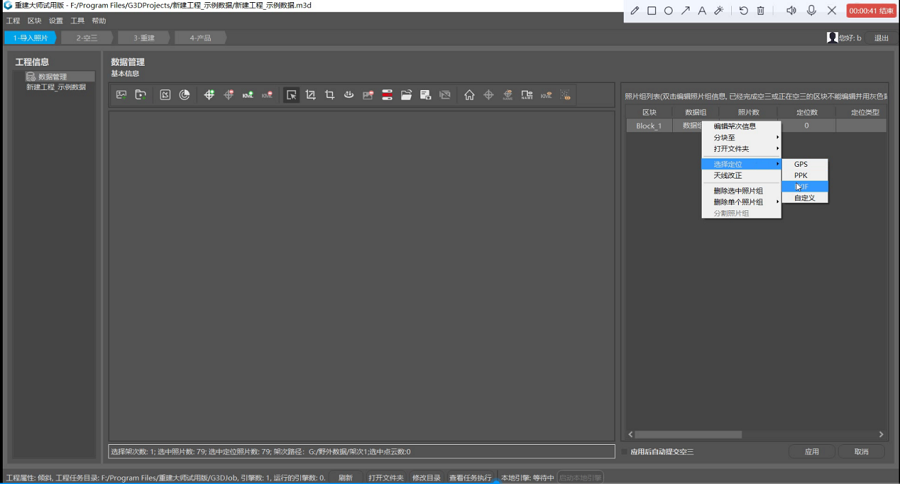 |
| 图:选择定位方式 |
点击“应用”。
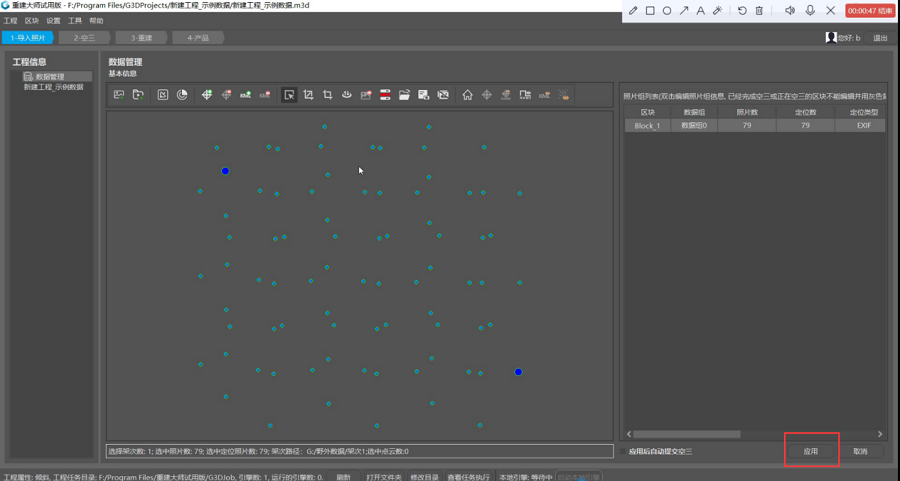 |
| 图:应用 |
选择“本地空三”。
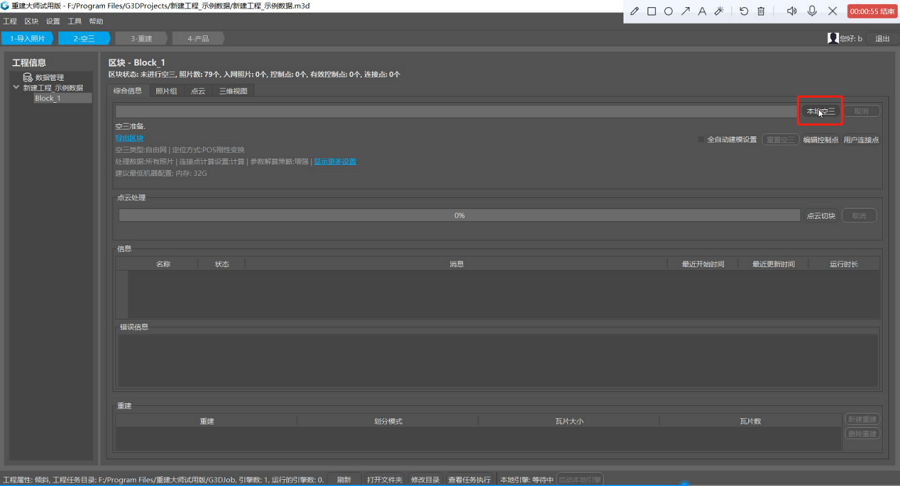 |
| 图:选择“本地空三” |
在弹出的提示框内选择“提交空三”。
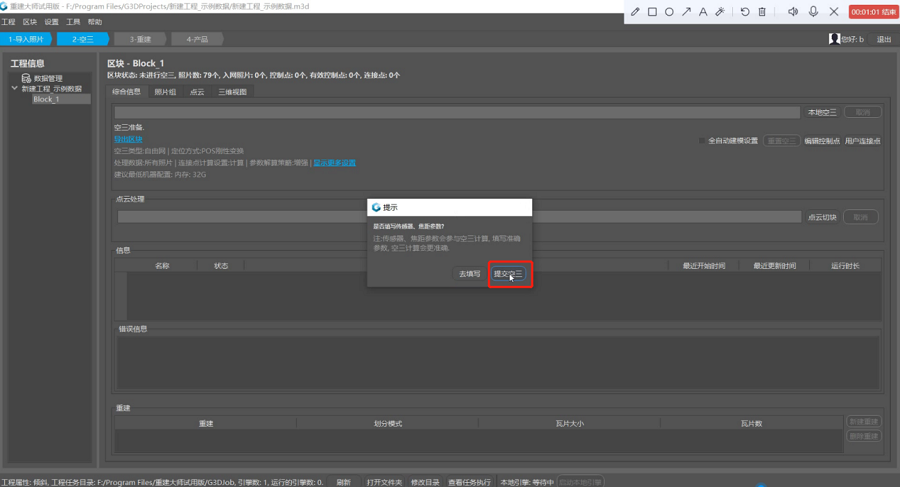 |
| 图:提交空三 |
空三设置均选择默认值,点击“确定”。
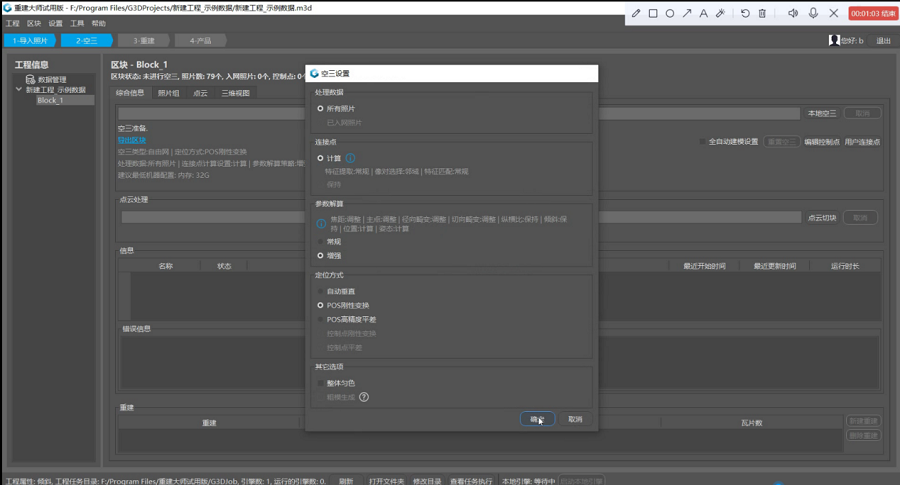 |
| 图:设置选择默认值 |
空三计算完成之后,点击“新建重建”。
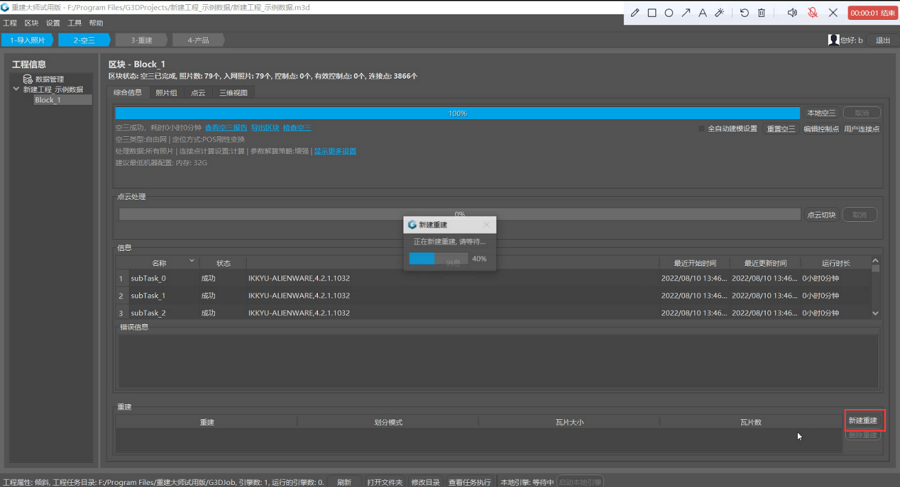 |
| 图:新建重建 |
坐标系按需设置,便于业务数据的采集和叠加。瓦片划分根据数据大小和业务需求选择不同的划分模式,最后点击“提交产品”。
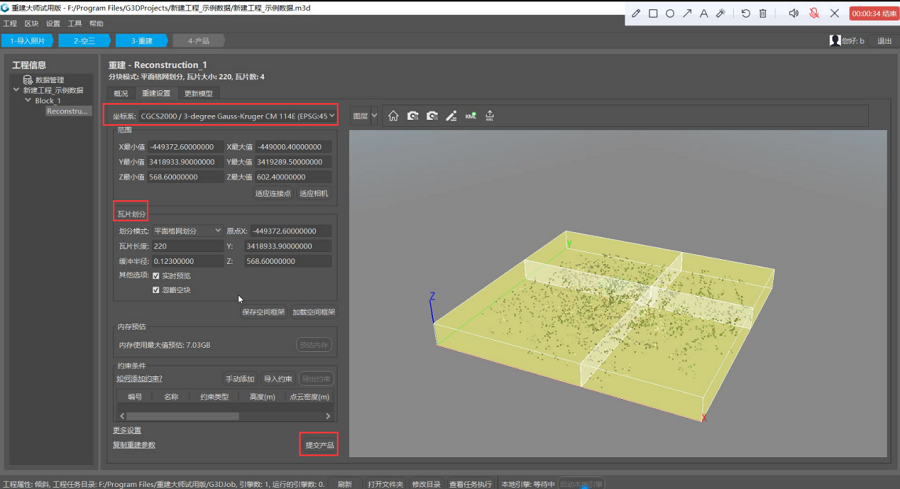 |
| 图:应用提交产品 |
在弹出的产品对话框内,设置产品名称,输出路径,选择“产品选项”并在对应的产品选项内设置对应参数,包括输出格式,纹理来源,纹理质量,纹理最大尺寸。三维数据生产业务中,选择产品为三维模型,输出格式选择OSGB或者OBJ均可,纹理来源选择“倾斜摄影”,其他选择默认值。设置完成后点击“提交”。
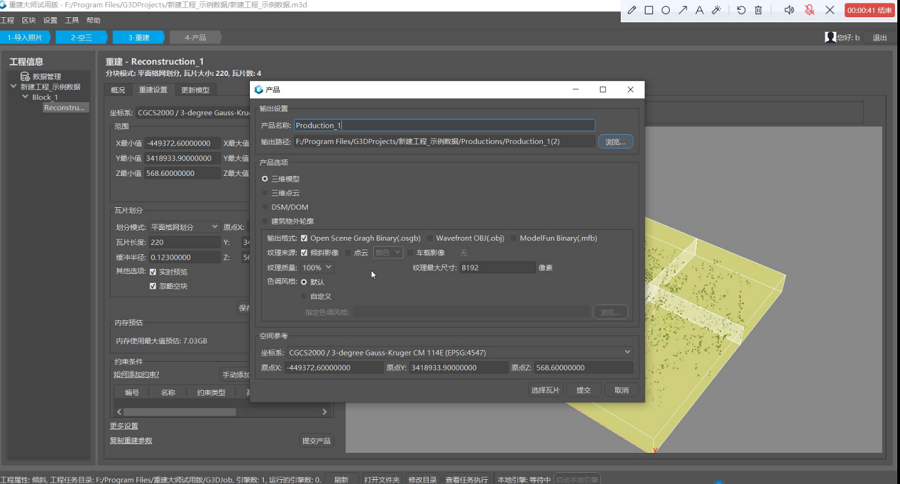 |
| 图:设置“产品选项” |
模型创建完成之后,点击“查看产品”。
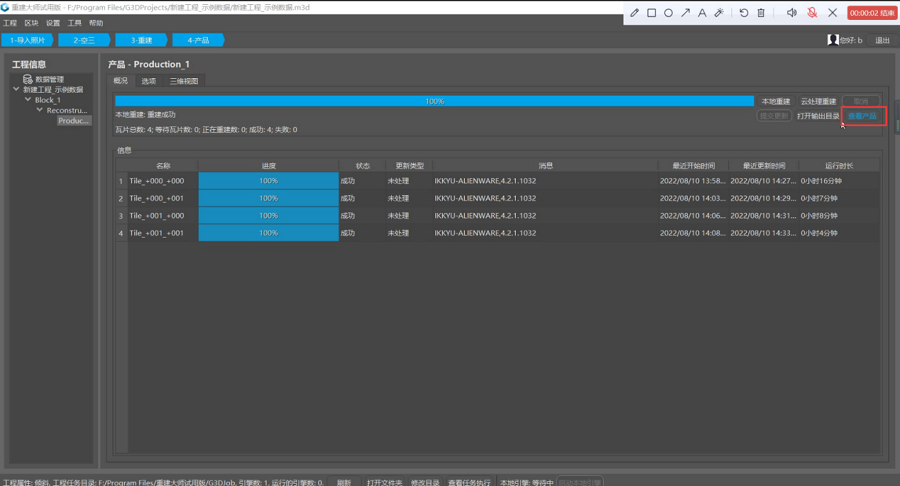 |
| 图:查看产品 |
此时查看的是创建好的三维模型。
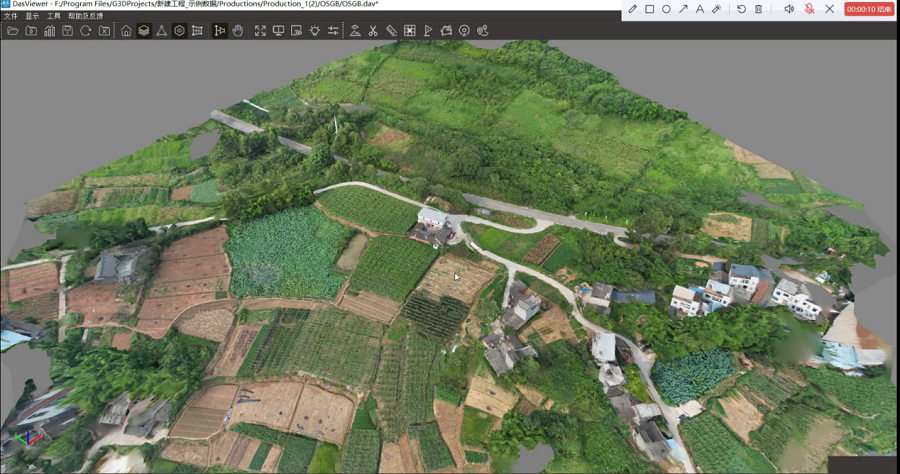 |
| 图:查看三维模型 |
工具条中选择工具/输出正射图。
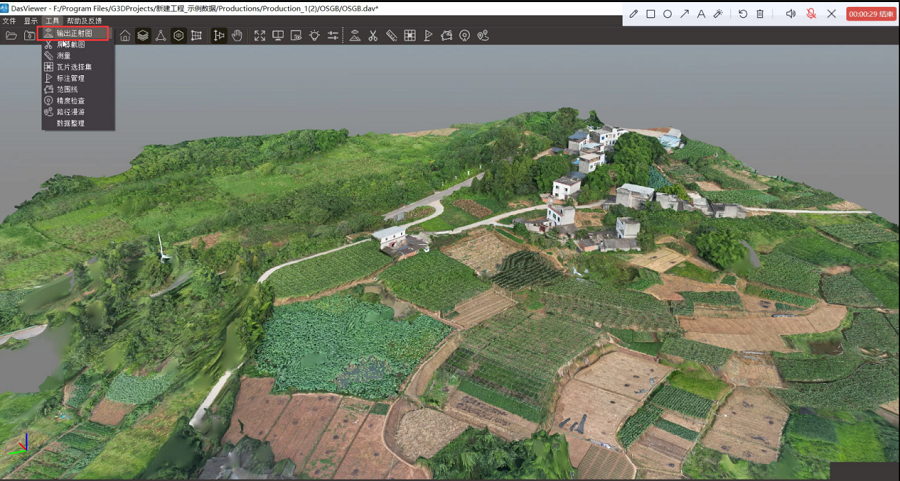 |
| 图:输出正摄图 |
在弹出的对话框内设置输出路径和分辨率,点击“确定”。
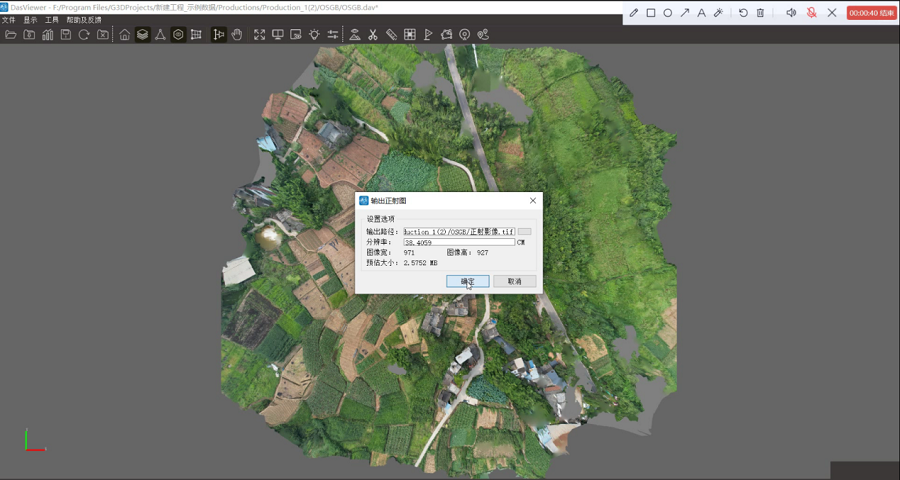 |
| 图:设置输出路径和分辨率 |
至此,二维正射tiff影像生成完成。
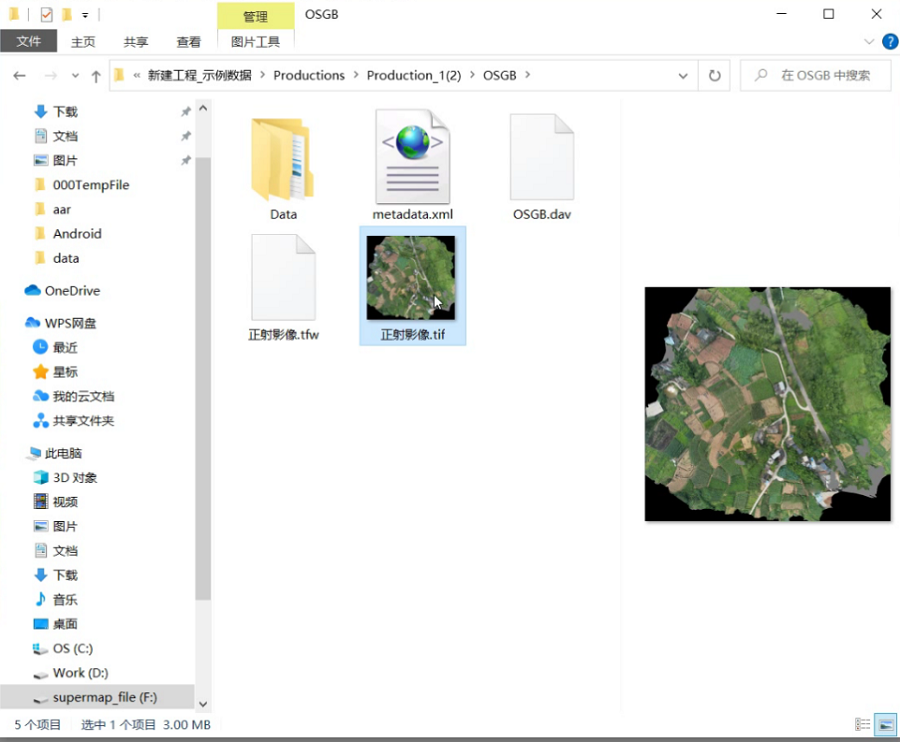 |
| 图:Tiff生成完成 |