



场景制作
室内导航模型将不同楼栋、不同楼层的数据有效的组织在一起。而不同楼层之间,需要通过构建楼梯关系才能建立连接;SuperMap iDeskstop 提供可视化交互的构建楼梯关系工具,通过加载室内导航模型,生成二三维一体的导航场景,用户可通过场景方便、快捷、准确的指定楼梯上行、下行的方向,从而实现相邻楼层路径的互通。
加载室内导航模型
构建楼梯关系前需要先加载室内导航模型,程序将按照楼层关系属性表,将各楼层的室内网络数据集、楼层底面数据集、室外底面数据集以及室外路网数据,自动加入场景并进行配图,生成二、三维一体的导航场景。
操作方法:
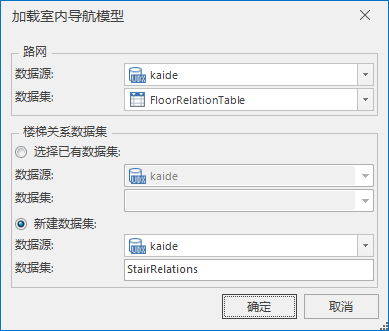
- 单击交通分析->室内导航->构建楼梯关系按钮,弹出加载室内导航模型对话框,在对话框中您将设置以下信息:
- 路网:设置已构建导航模型所在数据源及生成的楼层关系属性表数据集。
- 楼梯关系数据集:为三维线数据集,作为不同楼层之间的连接桥梁。可加载已存在的楼梯关系数据集,进行修改、删除、添加等管理操作,同时也可新建数据集,从初始构建楼梯关系。
- 完成上述设置,单击“确定”按钮,程序将自动加载导航模型中的数据集,生成二三维一体化的导航场景模型,同时弹出楼梯关系管理对话框。
 |
| 图:加载室内导航模型 |
 |
| 图:二三维一体化的导航场景 |
二三维一体导航场景
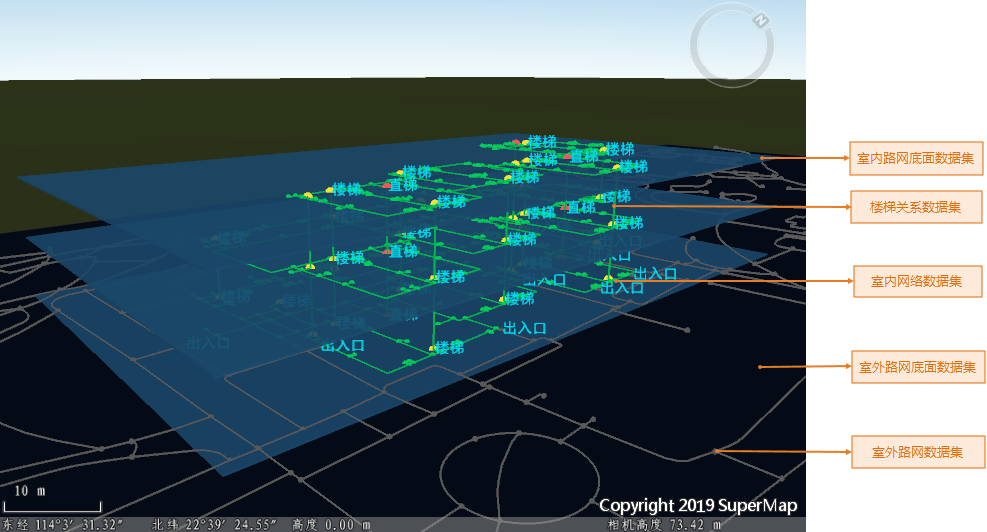
二三维一体导航场景是程序加载室内导航模型数据,经过不同风格设置、专题图处理后自动生成,用于展示不同楼栋及楼层的分布情况,在场景中可直观查看楼梯点、出入口等关键设施点的分布。
图层管理器中以楼层为单位组织数据,每个楼层的数据包含:室内路网底面数据集;室内网络数据集;根据路网数据集名称字段制作的标签专题图,用于展示关键设施点名称;以及按照关键设施点的类型字段制作的单值专题图,根据类型显示为不同的颜色用于区分不同设施点;若构建模式时添加了室外路网数据,场景中同时加载室外路网底面数据集及室外网络数据集。
当加载导航模型数据量较大时,场景加载花费时间较长,请您耐心等待。
 |
| 图:场景图层管理器图层图层列表 |
楼梯关系管理
在楼层关系管理对话框中,可进行查看、修改、构建等楼梯点管理操作,楼梯类型可分为直梯、步行楼梯以及扶梯;其中直梯、步行楼梯存在上行和下行两种关系;扶梯,可上行或下行,用户可根据数据情况指定。详细参数描述如下:
- 楼层:下拉菜单中显示当前导航模型中的参与楼层,您可指定楼层查看和管理楼梯关系。
- 类型:下拉菜单中显示当前楼层的楼梯类型,可选择直梯、步行楼梯、扶梯中的某一类型进行查看,默认显示全部类型。
- 关系:下拉菜单中分为已连接和未连接两种楼梯关系,可切换显示,默认显示全部。
 |
| 图:楼梯关系管理 |
楼梯列表区:选定楼层后,在列表区中依此排列了当前楼层的所有楼梯点数据信息,包括楼层ID、楼梯名称(类型)、方向以及到达ID以及到达楼层。双击某一具体楼梯点,在场景窗口中将高亮显示该楼梯点。
每个楼梯点都有一个固定的ID值,楼梯点会根据楼层的不同,存在上行、下行两个方向,所以一个楼梯点将生成两条记录信息,例如:楼梯点ID为 70004010188,楼层为1层,同时存在方向为上行和下行两条记录:第一条上行记录,到达楼层为2楼,需指定2楼到达ID;第二条下行记录,由于该楼栋无-1层,默认到达ID 将为无法下行,即不需要设置楼梯关系,“无法上行”或“无法下行”的楼梯关系,默认到达 ID 和到达楼层显示为“--”。
注:若相邻楼层之间的两个楼梯点(X,Y)坐标完全一致时,程序在加载室内导航模型时,会自动创建两个楼梯点的关系。
构建楼梯关系
提供“鼠标拾取”和“指定楼梯ID”两种方式构建楼梯关系:
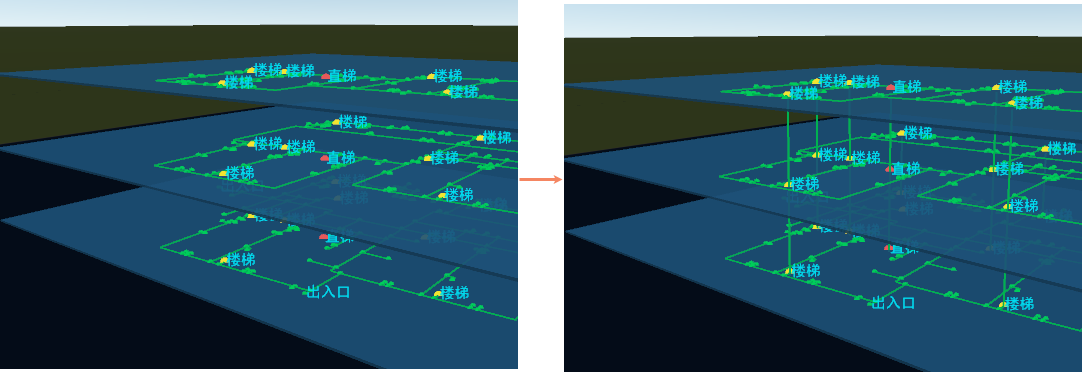
- 方式一:鼠标拾取,在楼梯点列表区中选择设置楼梯关系的的楼梯点记录,单击“鼠标拾取”按钮,将鼠标移至场景中,鼠标状态变为拾取状态,选择要到达的楼梯点,即可将两个楼梯点建立连接,生成一条三维线,同时程序自动将该楼梯点信息添加至到达ID和到达楼层的属性中。
- 方式二:指定楼梯ID,在楼梯点列表区中选择设置楼梯关系的的楼梯点记录,双击当前楼梯点的到达 ID 内容框,弹出到达ID列表框,在列表框中勾选到达ID的单选框。
可使用以上的的任意方式依次对楼梯点构建楼梯关系,下图所示为构建楼梯关系前后的对比图。
 |
| 图:构建楼梯关系前后对比图 |
缓存数据制作
为了让三维场景在移动端操作性能更高,以缓存的形式应用。
第一步:创建三维缓存
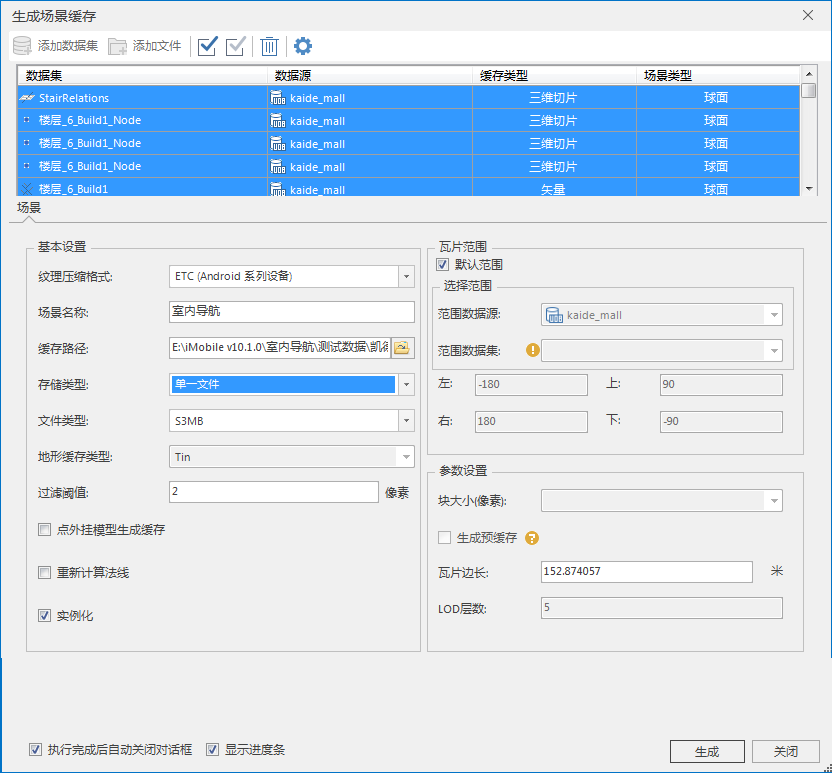
在【工作空间管理器】——【当前场景】右键——在右键菜单中选择【生成场景缓存】
在过程中,可能会出现“开启场景生成缓存,可能导致内存过大等问题,是否关闭?”及是否保存当前场景的提示,都选择“是”。
在“生成场景缓存”对话框中,选择全部数据集,选择“纹理压缩格式”(Android设备使用选择“Android系列设备”,iOS设备使用选择“iOS系列设备”)。
 |
| 图:生成场景缓存设置 |
第二步:重新调整数据结构
关闭当前工作空间;
场景缓存生成后,会产生一个新的工作空间,打开该工作空间;
将原始导航数据所在的数据源拷贝到新工作空间所在的文件夹下;
通过【工作空间管理器】——【数据源】右键——【打开文件型数据源…】,打开该数据源。
通过【开始】——【工作空间-保存】,保存工作空间。
至此,三维室内导航数据制作完成。
 |
| 图:室内三维导航数据结构示例 |
三维室内导航数据加载应用
室内导航功能是通过代码来实现的。参考代码如下:
打开工作空间、初始化导航模块
//打开工作空间
m_workspace = new Workspace();
WorkspaceConnectionInfo info = new WorkspaceConnectionInfo();
info.setServer(sdcard+"/SampleData/室内导航0526/室内导航.sxwu");
info.setType(WorkspaceType.SXWU);
boolean result = m_workspace.open(info);
if (!result) {
System.out.println("工作空间打开失败");
return;
}
m_sceneView= (SceneView)findViewById(R.id.scene_control);
m_sceneControl= m_sceneView.getSceneControl();
m_sceneControl.sceneControlInitedComplete(new SceneControlInitedCallBackListenner() {//场景控件初始化回调监听
@Override
public void onSuccess(String arg0) {
//打开场景
m_scene = m_sceneControl.getScene();
m_scene.setWorkspace(m_workspace);
String mapName = m_workspace.getScenes().get(0);
m_scene.open(mapName);
m_navigation3D = m_sceneView.getNavigation(); //获取导航模块
m_navigation3D.setUpdateDataMode(true);
m_navigation3D.setDatasource(m_workspace.getDatasources().get("kaide_mall"));
m_sceneControl.setNavigationControlVisible(true); //设置导航条可见
//初始化FloorList
m_floorListView3D = (FloorListView3D)findViewById(R.id.floor_list_view_3d);
m_floorListView3D.setVisibility(View.VISIBLE);
m_floorListView3D.setNavigation3D(m_navigation3D);
m_floorListView3D.linkScenepControl(m_sceneControl, m_workspace);
//设置三场景控件
m_navigation3D.setSceneControl(m_sceneControl);
//设置用户手势识别器(用于通过手势添加导航点)
m_sceneControl.setGestureDetector(new GestureDetector(m_sceneControl.getContext(), mSceneGestrueListener));
//添加导航引导信息更新监听器
m_navigation3D.addNaviInfoListener(new NaviListener() {
@Override
public void onStopNavi() {
//结束导航后,关闭导航状态
m_naviState = NAVI_STATE.STATE_NULL;
m_navigation3D.cleanPath();
System.out.println("导航停止");
}
@Override
public void onStartNavi() {
}
@Override
public void onPlayNaviMessage(String message) {
}
@Override
public void onNaviInfoUpdate(NaviInfo naviInfo) {
}
@Override
public void onAdjustFailure() {
}
@Override
public void onAarrivedDestination() {
//到达目的地,关闭导航状态
m_naviState = NAVI_STATE.STATE_NULL;
m_navigation3D.cleanPath();
System.out.println("导航到达目的地");
}
});
}
});添加导航点
//设置起点:可以连续设置,保留最后一次设置的值
m_navigation3D.setStartPoint(pt3d.getX(), pt3d.getY(), pt3d.getZ());
//设置终点:可以连续设置,保留最后一次设置的值
m_navigation3D.setDestinationPoint(pt3d.getX(), pt3d.getY(), pt3d.getZ());
//设置途径点:可以连续设置,途径点个数不限制 注意:没有起点和终点时不能添加途径点
m_navigation3D.addWayPoint(pt3d.getX(), pt3d.getY(), pt3d.getZ());路径分析
//路径分析
boolean bResult = m_navigation3D.routeAnalyst();
if(bResult){
Toast.makeText(m_sceneControl.getContext(), "路径分析成功", Toast.LENGTH_SHORT).show();
}
else{
Toast.makeText(m_sceneControl.getContext(), "路径分析失败", Toast.LENGTH_SHORT).show();
return;
}导航
//开始导航 0:真实导航, 1:模拟导航 ,2:巡航 ,3:步行导航
if(!m_navigation3D.startGuide(1)){
Toast.makeText(m_sceneControl.getContext(), "导航启动失败", Toast.LENGTH_SHORT).show();
return;
}