



In Raster Data, pixels typically represent the phenomenon of the dominant feature or pixel coverage area, while Vector Data accurately delineates or identifies each feature. How spatial objects are represented is the fundamental difference between raster and Vector Data structures. The vector structure uses points, lines, and faces the geographical elements in the real world to express, and uses the unique ID value to identify the elements, and its position is determined by the spatial position in the coordinate reference system; the grid structure uses the continuous pixel set with the same attribute value to express the geographical elements, and the geographical position of the elements is defined by the row and column number of the grid. For the Basic Type of a feature: Points, lines, and faces all have their own specific representation in the grid.
Point
A point is represented by a pixel in the Raster Data structure, and its value is significantly different from that of the neighboring pixels, as shown in the following figure. A point has no area, but the pixel represents the area of a certain area on the surface of the real world. When the spatial resolution of the pixel is smaller, the area covered is smaller, and the point represented by the pixel is closer to its Real Size and position. During the conversion from vector points to grid point data, when multiple points fall within the same pixel range, the system will randomly select a point as the value of the pixel, so the number of elements of the generated point Raster Data may be reduced, and the larger the pixel size of the grid is, the more points of the elements will be lost.
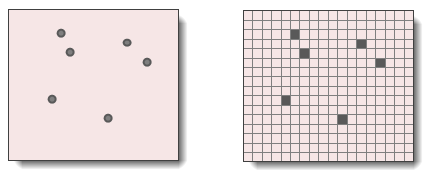 |
| Figure: Point feature representation in vector and grid |
Line
A line segment in a grid is represented by a string of pixels connected to each other, each with the same value, but with a large difference from the value of the neighborhood, as shown in the following figure. It is worth noting that the diagonal pixels are also connected pixels, so when there is only one connected pixel on the top, bottom, left and right sides of a pixel and on the diagonal, the disconnection of the marking element, and the pixel is one end of the line segment. When a vector line is converted into a grid line, if multiple line segments pass through the same pixel, the system assigns the value of a randomly selected line segment to the pixel. In addition, the size of a pixel represents the width of a line segment. For example, when a road is represented by a grid, the size of a pixel is 30 meters, and the width of the road is 30 meters. Therefore, when a linear feature is converted to a grid, the selected resolution, that is, the size of a pixel, should be close to the width of the thinnest line segment in Dataset.
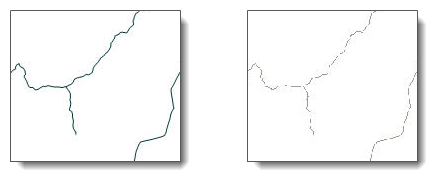 |
| Figure: Representation of line features in vector and grid |
Face
Faces are composed of interconnected pixels clustered together in the Raster Data structure. The pixel values inside the face are the same, but they are quite different from those of the neighborhood grid, as shown in the following figure. The accuracy of the polygon represented by the grid is related to the size of the pixel. The smaller the size of the pixel, the more pixels are used to depict the surface, and the higher the accuracy is. In the process of converting a vector polygon to a raster polygon, the value of a pixel is the attribute value of the polygon element that occupies most of the area of the pixel.
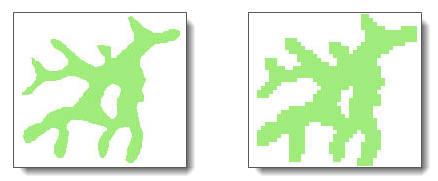 |
| Figure: Face feature representation in vector and grid |