



Feature Description
Projects a dataset based on the target projection coordinate system. The transformed dataset is saved in the target datasource.
The parameters of this tool differ depending on the "projection conversion method" set. The projection conversion methods can generally be categorized into three-parameter transformation methods and seven-parameter transformation methods:
Three-Parameter Transformation Method
When transforming between reference systems, a simpler method is the so-called three-parameter transformation method. The mathematical model of this method assumes that only the spatial origin has shifted between the two geodetic reference systems, without considering other factors (see Figure 1). This method inherently produces three parameters: the translation amounts in the X, Y, and Z directions. The three-parameter method is computationally simple but less accurate. It is generally used for transformations between different geocentric space rectangular coordinate systems.
Seven-Parameter Transformation Method
The mathematical model underlying the seven-parameter method considers not only the translation of the coordinate system but also factors such as coordinate system rotation and scale differences. Therefore, in addition to the three translation parameters, it requires three rotation parameters (also known as three Euler angles) and a scale factor. The transformation principle is shown in Figure 2. The three translation amounts are denoted by ΔX, ΔY, ΔZ; the three rotation transformation parameters are denoted by Rx, Ry, Rz; and the scale factor is denoted by S. Here, the scale factor represents the scale stretching amount from the original coordinate system transformation to the new coordinate system. Generally, the unit for translation parameters is meters (consistent with the unit), the unit for rotation angles is seconds, and the unit for the scale factor is parts per million.
The Geocentric Translation method, Molodensky method, and Molodensky-Abridged method are projection conversion methods with relatively lower accuracy. The three-parameter method requires three translation transformation parameters (ΔX, ΔY, ΔZ), as do the Molodensky and Molodensky-Abridged methods (ΔX, ΔY, ΔZ). These methods are generally acceptable when data accuracy requirements are not high.
The Position Vector method, Coordinate Frame method (based on geocentric), and Bursa-Wolf method are conversion methods with higher accuracy. They require seven parameters for adjustment and transformation, including three translation transformation parameters (ΔX, ΔY, ΔZ), three rotation transformation parameters (Rx, Ry, Rz), and one scale parameter (S). These methods are essentially identical, but their names differ due to regional or surveying school conventions.
In practical work, the choice of conversion method depends on the specific situation. Whether the transformation result is satisfactory depends on the setting of the transformation parameters. Transformation parameters can be obtained from official surveying institutions or data providers; they can also be derived from one's own measurements. The suitability of transformation parameters must be determined using control points that exist in both reference systems.
Parameter Description
| Parameter Name | Default Value | Parameter Interpretation | Parameter Type |
|---|---|---|---|
| Source Dataset | The source dataset to be projected. In the GPA WebUI interface of iServer, you can specify the dataset by clicking the "Settings" button on the right side of the parameter, completing the specification in the "Set Connection Info" dialog, and it supports datasets from various datasource types. Additionally, you can use the "Open the Dataset" tool to open a dataset, and then assign the returned dataset via a connection to the "Source Dataset" input parameter of the "Dataset Projection Transformation" tool, as shown below. This way, when the model executes, the opened dataset is dynamically assigned to the corresponding parameter of the "Dataset Projection Transformation" tool. Thus, the "Source Data" input parameter of the "Dataset Coordinate System Transformation" tool can also be passed via connection from the result dataset output by other GPA tools. |
Dataset | |
| Target Coordinate System | The target coordinate system after the source data conversion. In the GPA WebUI interface of iServer, this parameter requires entering the EPSG code corresponding to the coordinate system, for example: a parameter value of 4326 represents the WGS 1984 geographic coordinate system. In the iDesktopX GPA interface, this parameter can be set via a dialog, as shown below: . . |
PrjCoordSys | |
| Target Datasource | The specified datasource for storing the result dataset after projection. In the GPA WebUI interface of iServer, you can specify the datasource by clicking the "Settings" button on the right side of the parameter, completing the specification in the "Set Connection Info" dialog, and it supports various datasource types. Additionally, you can use the "Open Datasource" tool to open a datasource, and then assign the returned datasource via a connection to the "Target Datasource" input parameter of the "Dataset Projection Transformation" tool, as shown below. This way, when the model executes, the opened datasource is dynamically assigned to the "Target Datasource" parameter. 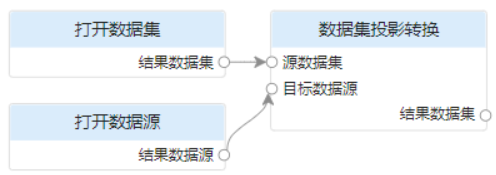 |
Datasource | |
| The Name of the Resulting Dataset | Specifies the name of the result dataset after projection. | String | |
| Scale Difference | 0.0 | This parameter is the scale factor, representing the scale stretching amount from the original coordinate system transformation to the new coordinate system. | Double |
| Rotation Angle X | 0.0 | Rotation transformation parameter, representing the rotation angle of the X-axis, unit: seconds. | Double |
| Rotation Angle Y | 0.0 | Rotation transformation parameter, representing the rotation angle of the Y-axis, unit: seconds. | Double |
| Rotation Angle Z | 0.0 | Rotation transformation parameter, representing the rotation angle of the Z-axis, unit: seconds. | Double |
| Offset X | 0.0 | Coordinate offset (also called translation) for the X-axis. | Double |
| Offset Y | 0.0 | Coordinate offset (also called translation) for the Y-axis. | Double |
| Offset Z | 0.0 | Coordinate offset (also called translation) for the Z-axis. | Double |
| Rotation Origin X Coordinate | 0.0 | The X-coordinate value of the rotation origin. | Double |
| Rotation Origin Y Coordinate | 0.0 | The Y-coordinate value of the rotation origin. | Double |
| Rotation Origin Z Coordinate | 0.0 | The Z-coordinate value of the rotation origin. | Double |
| Projection Conversion Method | MTH_GEOCENTRIC_TRANSLATION | The method used for projection. SuperMap provides several commonly used projection transformation methods; see the "Projection Conversion Method" table below for details. | CoordSysTransMethod |
Table: Projection Conversion Method
| Name | Description |
|---|---|
| MTH_GEOCENTRIC_TRANSLATION | GeocentricTranslation - A three-parameter transformation method based on the geocenter. |
| MTH_MOLODENSKY | Molodensky transformation method, a three-parameter transformation method. |
| MTH_MOLODENSKY_ABRIDGED | MolodenskyAbridged - Simplified Molodensky transformation method, a three-parameter transformation method. |
| MTH_POSITION_VECTOR | PositionVector - Position Vector method, a seven-parameter transformation method. |
| MTH_COORDINATE_FRAME | CoordinateFrame - Geocentric-based seven-parameter transformation method, a seven-parameter transformation method. |
| MTH_BURSA_WOLF | Bursa-Wolf method, a seven-parameter transformation method. |
| MolodenskyBadekas | Molodensky-Badekas projection conversion method, a ten-parameter spatial coordinate transformation model. |
| China_3D_7P | 3D Seven-Parameter transformation model, used for transformations between different coordinate systems and the China Geodetic Coordinate System 2000 (CGC2000). Applicable for control point coordinate transformation between geodetic coordinate systems under different earth ellipsoid datums at national and provincial levels for ellipsoidal surfaces of 3 degrees and above. The model involves three translation parameters, three rotation parameters, and one scale change parameter, while also considering the differences in the semi-major axis and flattening between the two earth ellipsoids corresponding to the two geodetic coordinate systems. |
| China_2D_7P | China_2D_7P - 2D Seven-Parameter transformation model, used for transformations between different coordinate systems and the China Geodetic Coordinate System 2000 (CGC2000). Applicable for control point coordinate transformation between geodetic coordinate systems under different earth ellipsoid datums at national and provincial levels for ellipsoidal surfaces of 3 degrees and above. The model involves three translation parameters, three rotation parameters, and one scale change parameter. For transformations from the 1954 Beijing Coordinate System and the 1980 Xi'an Coordinate System to CGC2000, due to the lower accuracy of geodetic heights in these geocentric coordinate systems, the 2D seven-parameter transformation is recommended. |
| China_2D_4P | 2D Four-Parameter transformation model, used for transformations between different coordinate systems and the China Geodetic Coordinate System 2000 (CGC2000). Applicable for control point coordinate transformation at provincial and local levels within a local range of 2 degrees or less. The model involves three translation parameters and one scale change parameter. |
| MTH_Prj4 | PROJ4 Transformation Method projection algorithm. This algorithm is based on the third-party projection tool PROJ4, thus supporting more projection operations and meeting the data projection needs of more overseas users. This projection algorithm only supports transformations between projections that have corresponding EPSG Codes. |
| MTH_EXTENTION | Users can utilize SuperMap's projection extension functionality by writing custom transformation algorithms to achieve projections and transformations of geographic coordinate systems. |
| BD09toGCJ02 | Baidu Coordinate System to GCJ-02 (Mars) Coordinate System. |
| GCJ02TOBD09 | GCJ-02 (Mars) Coordinate System to Baidu Coordinate System. |
| GCJ02TOWGS84 | GCJ-02 (Mars) Coordinate System to WGS84. |
| WGS84TOGCJ02 | WGS84 to GCJ-02 (Mars) Coordinate System. |
Output Result
| Parameter Name | Parameter Interpretation | Parameter Type |
|---|---|---|
| Result Dataset | The result dataset. Special Note: The tolerance of the result dataset after projection will be updated according to the new projection. |
Dataset |